SwiftPro Documentation
Note: Always adhere to safety protocols to avoid any damage to your drone or potential injury.
Roll, Pitch,Yaw and Throttle
- Roll
- Drone tilts left and right which changes the net resultant and moves in left or right direction.

- Image Shows the Right-side roll stick so drone will move to right.
- Pitch
- Drone tilts front and back which changes the net resultant and moves in front or back direction.

- Image Shows the Right-side pitch stick so drone will move to front.
- Yaw
- Drone rotates in circular motion in z axis in clockwise or anticlockwise direction.

- Image Shows the Left-side Yaw stick so drone will rotate in clockwise direction from top view.
- Throttle
Drone moves in up and down direction.

Image Shows the Left-side Throttle stick so drone will increase its height.
Youtube video to understand the Roll, Pitch, Yaw and Throttle concept

Start RadioMaster
Power on
- Press the PowerButton at the Center of your RadioMaster Boxer

- Long Press Until The Light Turns up blue and you receive a boot completed sound.
Select Model
- Then Press the
MDli.e Model button on bottom right side. All the models will be lised on the screen. 
- Using the Horizontal Cusor select (Scroll Right or Left) the option
04 S PRO MAXoption and press the cursor at the center you should see the Dialog box havingSelect modeloption. - If you see the
Backup modeloption that means that option is already selected. - Press the
RTNbutton (on bottom Left) to go back until you see theS PRO MAXmodel name and Battery Voltage on the screen
Drone Setup
- Keep the Drone on ground properly, you should not put drone tilted, upside-Down it can cause damage to drone or someone.
- Ensure the battery is completly charged.
- Insert in the
Batterydrone battery holder. - Wait Until the drone is completly ready to fly.
- Ensure that the propellers are free to move and battery wires is away from it.
- Ensure the
Throttlestick is down ,and roll/pitch stick is at center. - Ensure the
Arming/DisarmingButtonSAis up inDisarmstate. - Ensure the
FlightModesbuttonSBis in topStabilizemode. (Recommended for First Flight Ensure you have good practice in Liftoff Simulator, refer Experiments Page.) - When ready you can see the
cellular towertype image on your radiomaster screen, it means drone is communicating with the transmitter. 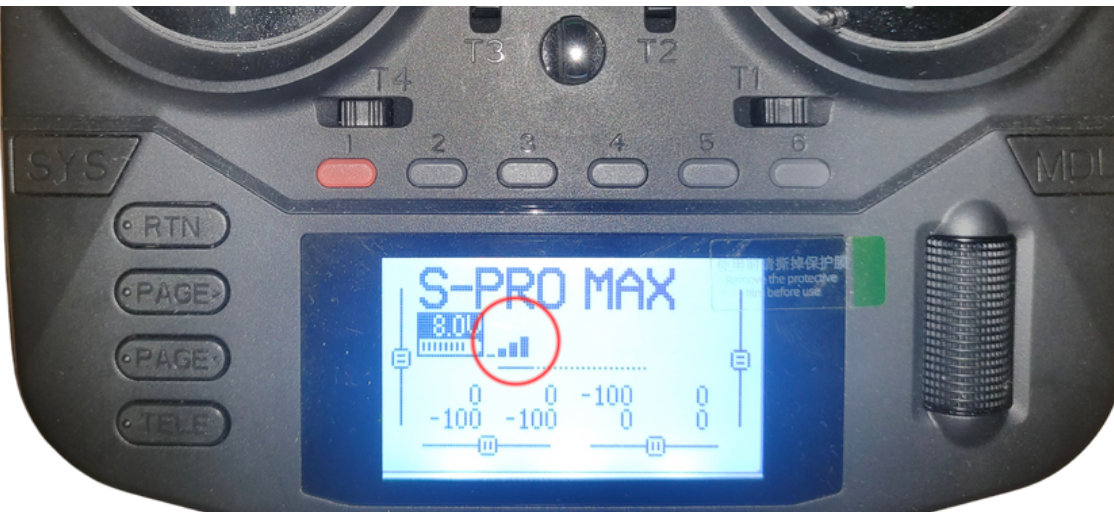
- The pilot should know which button does what function and what stick will have which action on Drone.(Learn about Roll, Pitch, Yaw and Throttle first it pilot doesn't have any idea.)
- Pull
SAbutton Arm buttonDownensuring Throttle stick at low (Zero) and roll/Pitch at center. - Check if it is arming, on successfull arming use joysticks to control the drone.
- Press the
TELETelementory button on bottom left and you can see the - Model Name :
S PRO MAXand Battery of Transmitter :6.8 to 8V - Flight Mode :
FM Selected Flight Modeand Satellite CountSATS 10. - Receiver Battery: RxBt :
10 to 12 V - Note: If flying in
PosHOLDmode thrSATSshould be more than 10.
Refer Experiments Section For Flying.
Stabilize Mode
- Stabilize mode allows you to fly your vehicle manually, but self-levels the roll and pitch axis.
- Pilot’s roll and pitch input control the lean angle of the copter. When the pilot releases the roll and pitch sticks the vehicle automatically levels itself.
- Pilot will need to regularly input roll and pitch commands to keep the vehicle in place as it is pushed around by the wind.
- Pilot’s yaw input controls the rate of change of the heading. When the pilot releases the yaw stick the vehicle will maintain its current heading.
- Pilot’s throttle input controls the average motor speed meaning that constant adjustment of the throttle is required to maintain altitude. If the pilot puts the throttle completely down the motors will go to their minimum rate (MOT_SPIN_ARMED) and if the vehicle is flying it will lose attitude control and tumble. However, this behavior can be changed by enabling AirMode.
Altitude Hold Mode
- In altitude hold mode, Copter maintains a consistent altitude while allowing roll, pitch, and yaw to be controlled normally. This page contains important information about using and tuning alt hold.
- When altitude hold mode (aka AltHold) is selected, the throttle is automatically controlled to maintain the current altitude. Roll, Pitch and yaw operate the same as in Stabilize mode meaning that the pilot directly controls the roll and pitch lean angles and the heading.
- Automatic altitude hold is a feature of many other flight modes (Loiter, Sport, etc) so the information here pertains to those modes as well.
FlowHold Mode
Note: FlowHold needs a good texture ground to maintain position lock.
- The PosHold flight mode is similar to PosHold or Loiter in that the vehicle maintains a constant location, heading, and altitude but is generally more popular because the pilot stick inputs directly control the vehicle’s lean angle providing a more “natural” feel.
- When switched on, PosHold mode will automatically attempts to maintain the current location, heading and altitude.
- The pilot can control the copter’s location horizontally and vertically with the control sticks.
PosHold Mode
Note: Fly the drone in PosHold when SAT count on Telementry screen is more that 8.
- The PosHold flight mode is similar to Loiter in that the vehicle maintains a constant location, heading, and altitude but is generally more popular because the pilot stick inputs directly control the vehicle’s lean angle providing a more “natural” feel.
- When switched on, PosHold mode will automatically attempts to maintain the current location, heading and altitude.
- The pilot can control the copter’s location horizontally and vertically with the control sticks.