Swift Pro Max Experiments
How to Fly!!
- Anyone who flies the drone need to know proper piloting before flying the drone.
Disclaimer : In any case if you miss to follow the instruction manual, e-Yantra is not responsible for any loss.
Important Note :First learn to fly in simulator ex. LiftOff for atleast 50 to 60 hours and first flight should be in Stabalize Mode.
Ensure Your Setup is Complete
- Confirm that your setup is complete.
- Select the Swift Pro Max model on your Radio Master.
- Verify that the Cellular Tower is visible on the Swift Pro Max screen.
- Ensure the drone can be armed and disarmed properly.
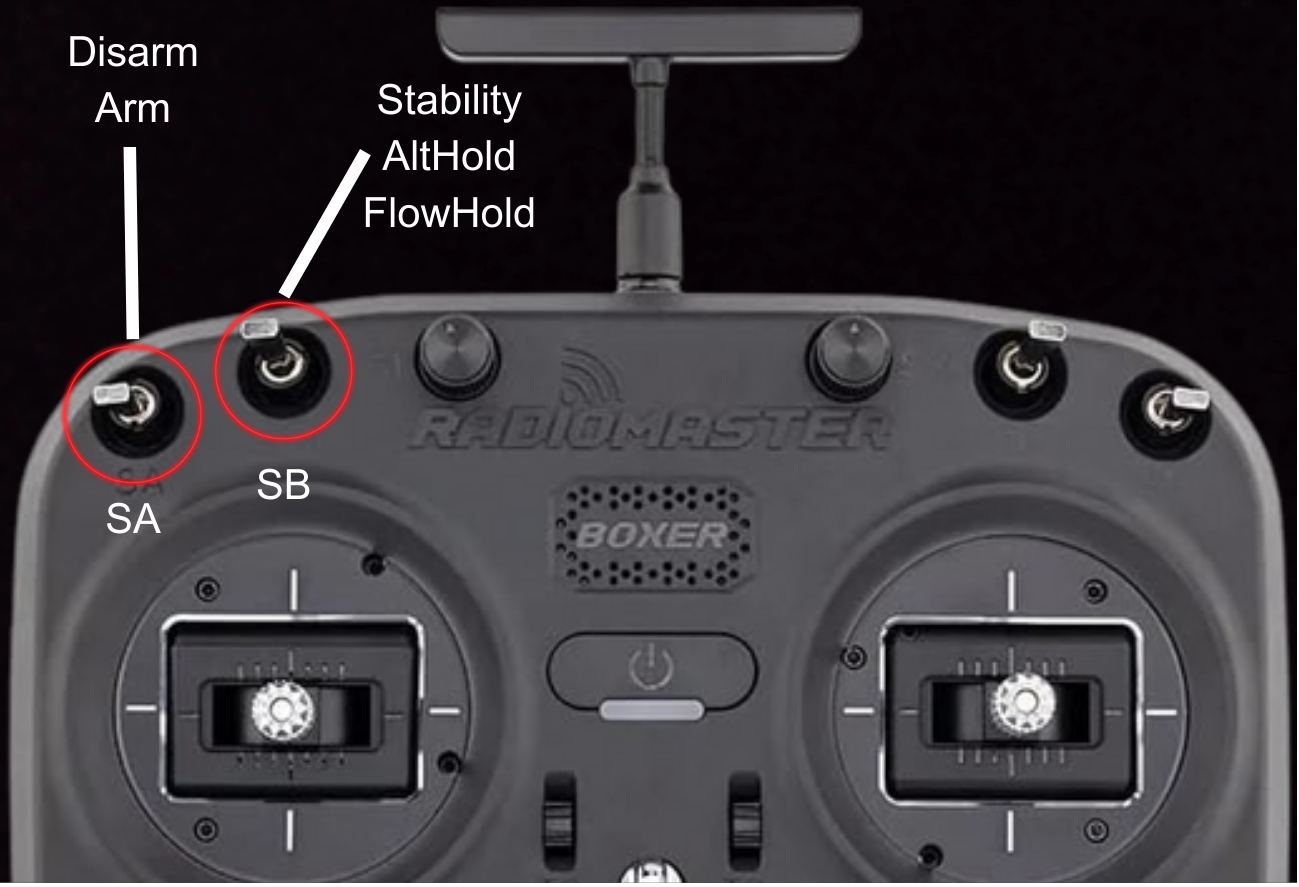
The SA button controls the Arm/Disarm function.
- SA Switch UP: Disarm State.
- SA Switch DOWN: Arm State.
The SB button controls the Flight Modes.
- SB Switch UP: Stabilize Mode.
- SB Switch CENTER: AltHold Mode.
- SB Switch DOWN: FlowHold Mode.
How to set Flight modes on RC buttons.
- Connect the Drone via USB wire.
- And also Power on the Radio Master and connect to the drone.
- Go to
Mission Plannerand connect it. - Go to
SETUP-->Flight Modes.
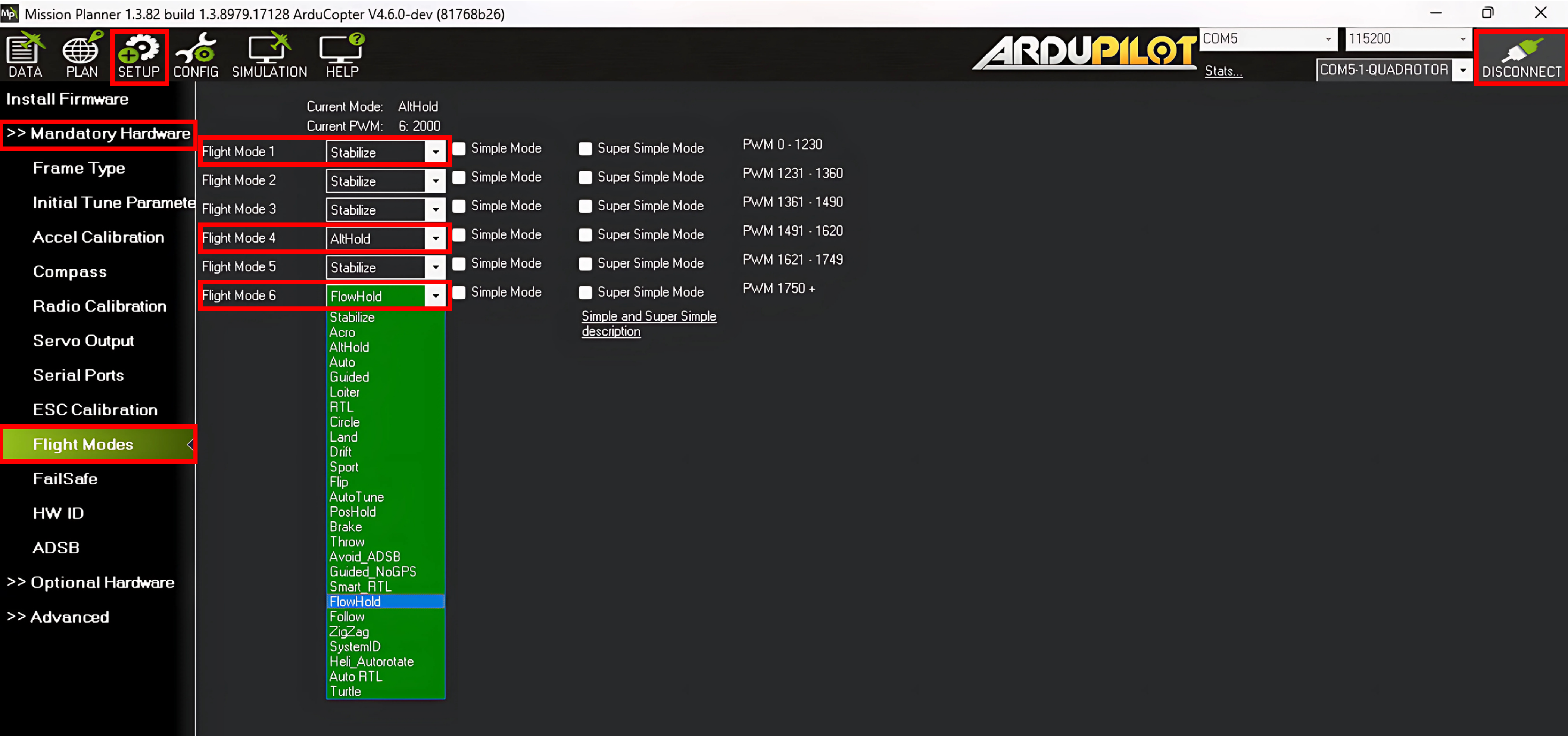
- If you have booted Custom Firmware you can use FlowHold Mode.
- Just see by switching
SBkey on RadioMaster Boxer the Flight mode changes fromFlight Mode 1toFlight Mode 4toFlight Mode 6. - Set whatever you want but for safety keep Stabalize Mode so that if drone doesn't response properly you can quickly switch to stabilize mode and take a manual control.
Important Note for switching from FlowHold to Loiter or PosHold Mode.
FlowHold mode uses
Optical flowsensor to gets its Velocity in XY plane.PosHold or Loiter mode uses
GPSsensor to gets its Velocity in XY plane.And Ardupilot uses Extended Kalman Filter (EKF) where it uses
SRC1to get values from sensors, if not getting good values it switches toSRC2and same forSRC3, this is the sensor fusion.So in Loiter or PosHold we should use EKF_SRC1_VELXY : GPS, EKF_SRC2_VELXY : GPS, EKF_SRC3_VELXY : None.
And in FlowHold we should use EKF_SRC1_VELXY : OpticalFlow, EKF_SRC2_VELXY : GPS, EKF_SRC3_VELXY : None.

A. Setting parameters for FlowHold (Option only for Custom Firmware).
Go to
Mission Planner-->Config-->Full Parmeter List-->EK3-->EK3_SRC1.Set the values as shown in table below.
Go to
EK3-->EK3_SRC1.
| parameters | Values | Options |
|---|---|---|
| EK3_SRC1_POSXY | 3 | GPS |
| EK3_SRC1_POSZ | 2 | RangeFinder |
| EK3_SRC1_VELXY | 5 | OpticalFlow |
| EK3_SRC1_VELXY | 3 | GPS |
| EK3_SRC1_YAW | 1 | Compass |
- Go to
EK3-->EK3_SRC2.
| parameters | Values | Options |
|---|---|---|
| EK3_SRC2_POSXY | 3 | GPS |
| EK3_SRC2_POSZ | 1 | Baro |
| EK3_SRC2_VELXY | 3 | GPS |
| EK3_SRC2_VELXY | 3 | GPS |
| EK3_SRC2_YAW | 1 | Compass |
- Go to
EK3-->EK3_SRC3.
| parameters | Values | Options |
|---|---|---|
| EK3_SRC3_POSXY | 0 | None |
| EK3_SRC3_POSZ | 1 | Baro |
| EK3_SRC3_VELXY | 0 | None |
| EK3_SRC3_VELXY | 0 | None |
| EK3_SRC3_YAW | 0 | None |
- After setting this parameter do press
Write Paramson right panel and confirmokall the changes.
B. Setting parameters for Loiter and PosHold.
Go to
Mission Planner-->Config-->Full Parmeter List-->EK3-->EK3_SRC1.Set the values as shown in table below.
Go to
EK3-->EK3_SRC1.
| parameters | Values | Options |
|---|---|---|
| EK3_SRC1_POSXY | 3 | GPS |
| EK3_SRC1_POSZ | 2 | RangeFinder |
| EK3_SRC1_VELXY | 3 | GPS |
| EK3_SRC1_VELXY | 3 | GPS |
| EK3_SRC1_YAW | 1 | Compass |
- Go to
EK3-->EK3_SRC2.
| parameters | Values | Options |
|---|---|---|
| EK3_SRC2_POSXY | 3 | GPS |
| EK3_SRC2_POSZ | 1 | Baro |
| EK3_SRC2_VELXY | 3 | GPS |
| EK3_SRC2_VELXY | 3 | GPS |
| EK3_SRC2_YAW | 1 | Compass |
- Go to
EK3-->EK3_SRC3.
| parameters | Values | Options |
|---|---|---|
| EK3_SRC3_POSXY | 0 | None |
| EK3_SRC3_POSZ | 1 | Baro |
| EK3_SRC3_VELXY | 0 | None |
| EK3_SRC3_VELXY | 0 | None |
| EK3_SRC3_YAW | 0 | None |
- After setting this parameter do perss
Write Paramson right panel and confirmokall the changes.
1. Fly in Stabilize Mode
- This mode is essential for all other flight modes.
- Prerequisite: Learn to fly a drone using a simulator. Aim for about 40-50 hours of practice. You can use the Liftoff Simulator.
Once you've learned to fly, follow these steps while prioritizing safety:
- Ensure the throttle stick is down and the roll/pitch is centered.
- Pull the SA switch down (SA: DOWN) to arm the drone.
- Keep the SB switch up (SB: UP) in Stabilize Mode initially.
- Gradually increase the throttle to lift off and land.
- As you gain confidence, practice performing roll and pitch maneuvers.
- After some practice, you’ll be ready to fly in different modes.
2. Fly in AltHold Mode
- Prerequisite: You must master Stability Mode to maintain manual control if the drone goes out of control.
- Once you're proficient in Stability Mode, you can move to AltHold Mode.
- Ensure the throttle stick is down and the roll/pitch is centered.
- Pull the SA switch down (SA: DOWN) to arm the drone.
- Set the SB switch to center (SB: CENTER) for AltHold Mode.
Key Points:
- In AltHold mode, you provide velocity rather than angles. At 0% throttle, the drone will begin to decelerate based on the settings in the full parameter list.
- At 50% throttle, the drone will maintain its current position.
- At 100% throttle, it will climb at the rate specified in the parameter list.
- Between 0-50%, the throttle maps speed from 0 to maximum deceleration.
- Between 50-100%, it maps speed from 0 to maximum acceleration.
- Gradually increase the throttle to lift off and land.
- This mode will automatically level the drone, but you still need to manage roll and pitch.
The RangeFinder operates effectively up to 120 cm from the ground; beyond that, the barometer takes over due to sensor limitations. If the drone becomes unmanageable, switch back to Stability Mode (SB: UP) to regain control.
3. Fly in FlowHold Mode
Disclaimer: Requires good texture surface for optical flow sensor.
- Prerequisite: You must master Stability Mode to maintain manual control if the drone goes out of control.
- Once you're proficient in Stability Mode, you can move to FlowHold Mode.
- Ensure the throttle stick is down and the roll/pitch is centered.
- Pull the SA switch down (SA: DOWN) to arm the drone.
- Set the SB switch down (SB: DOWN) for FlowHold Mode.
Key Points:
- Similar to AltHold, in FlowHold mode, you provide velocity instead of angles. At 0% throttle, the drone decelerates based on parameter settings.
- At 50% throttle, it maintains its position.
- At 100% throttle, it climbs according to the parameter list.
- Gradually increase the throttle and wait a few seconds for the drone to respond.
- The RangeFinder works effectively up to 120 cm; beyond that, the barometer takes over.
- To lock the drone's position on the roll and pitch axes, it uses an optical flow sensor. This may take several seconds and requires a good ground texture for effective locking.